Projects
Selected engineering and academic projects
Durandal Fencing System
Wireless wearable fencing referee
Product Engineering & IoT · Entrepreneurial
Context (The Why)
Competitive fencing requires expensive wired scoring equipment, limiting where athletes can train.
Solution (The What)
A hip-worn wireless device that detects FIE-legal hits via DSP and communicates with a hub and web dashboard in under 10 ms.
Implementation (The How)
Built a hub-and-spoke architecture over ESP-NOW and developed FFT/FIR algorithms to classify valid 500 g touches.

Role
Product Engineer & Team Leader
Duration
2024 - 2025
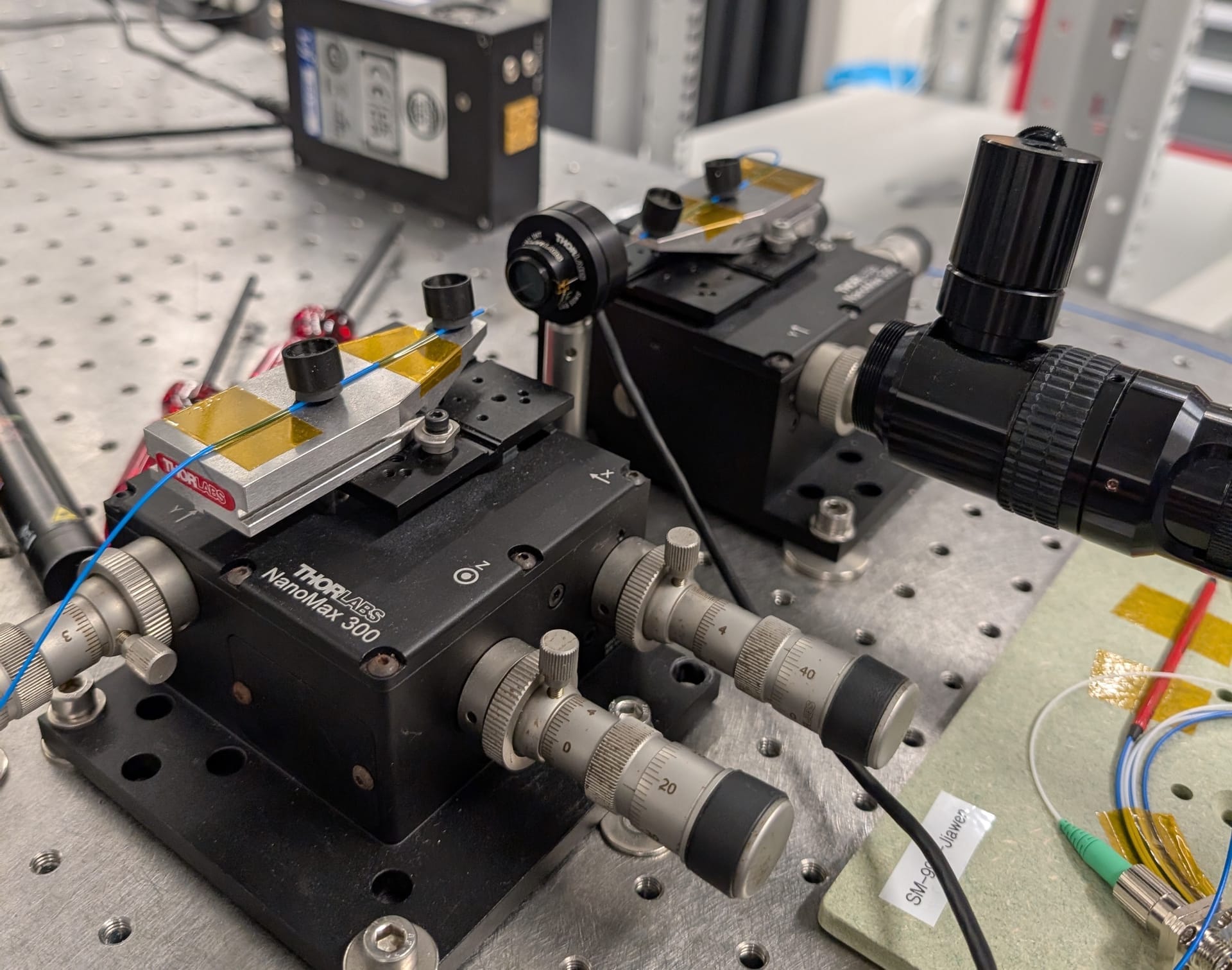
Sub-THz Wireless Modulators
Comparative study of TFLN vs TFLT
Microelectronics & Photonics · Research
Context (The Why)
6G wireless needs efficient radio-to-optical converters at sub-THz frequencies, but cheaper lithium tantalate remains uncharacterized against the standard lithium niobate.
Solution (The What)
Characterized 40 antenna-coupled modulators on TFLN and TFLT at 100 and 300 GHz, showing TFLN wins on efficiency while TFLT offers superior yield.
Implementation (The How)
Automated a 5-instrument opto-electronic bench in Python, cutting measurement time by 80 %, with custom sideband extraction down to the −70 dB noise floor.
Role
Research Assistant
Duration
Fall 2025
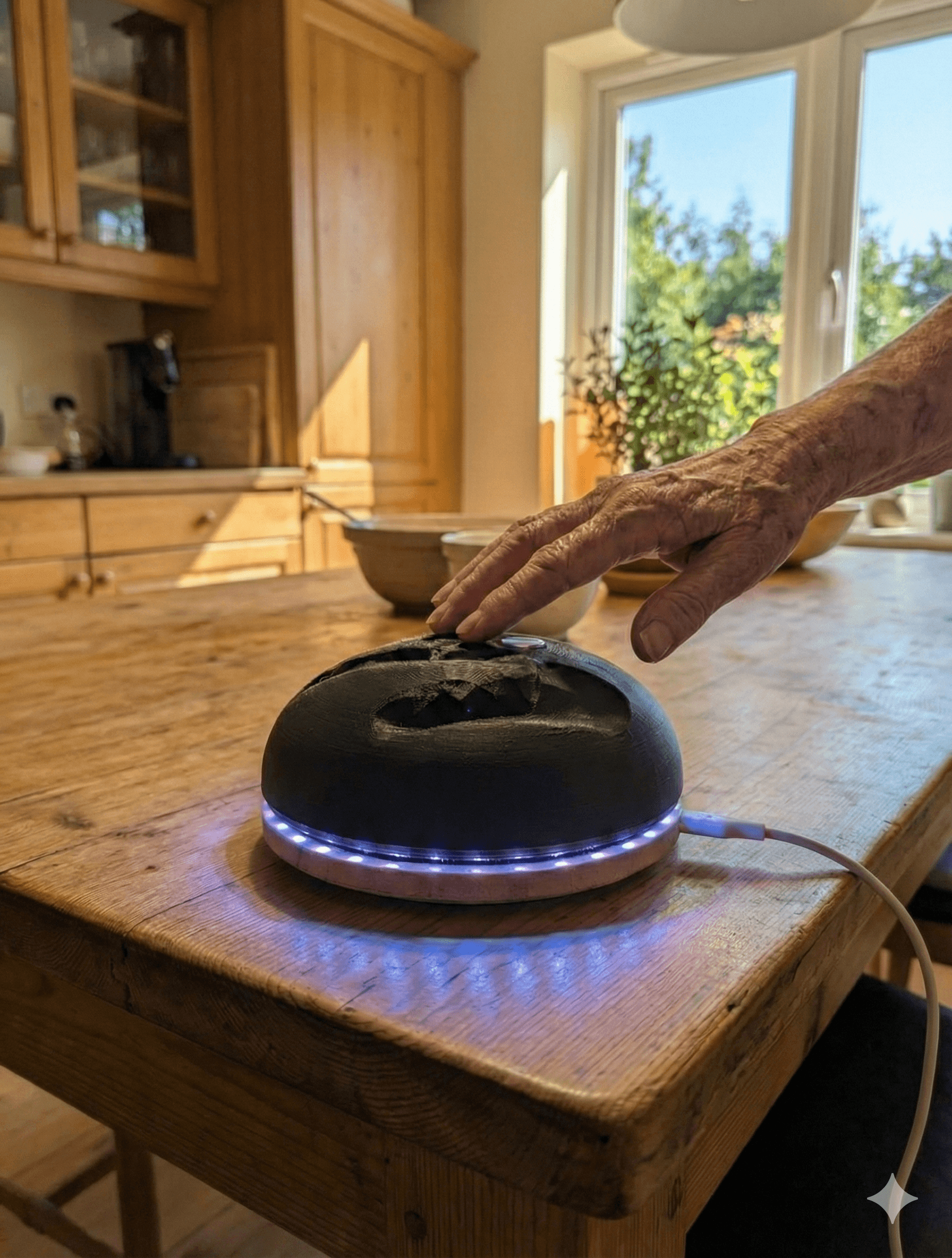
The Guardian Angel
Privacy-preserving fall detection
Product Engineering & IoT · Academic
Context (The Why)
Elderly people forget wearables, and cameras invade privacy. Caregivers need passive, non-intrusive health monitoring.
Solution (The What)
A 3-part camera-free ecosystem — ceiling radar for fall detection, tabletop vital sensor, and web dashboard — awarded Best Project after a successful live demo.
Implementation (The How)
Designed a hybrid Firebase backend (RTDB for real-time vitals, Firestore for history) with role-based access and patient consent handshake.
Role
Systems Engineer
Duration
Fall 2025
UHF Ground Segment
Automated CubeSat Tx/Rx ground station
Microelectronics & Photonics · Academic
Context (The Why)
The EPFL Spacecraft Team's experimental UHF downlink needed upgrading to a fully automated two-way ground station for CubeSats in LEO.
Solution (The What)
A Tx/Rx ground segment under development, integrating RF hardware, GNU Radio pipelines, and REST-API mission control for automated CubeSat communication.
Implementation (The How)
Evaluating antenna and RF chain trade-offs, developing GNU Radio modulation scripts, and integrating the uplink into ground segment software.

Role
RF Systems Engineer
Duration
Spring 2026
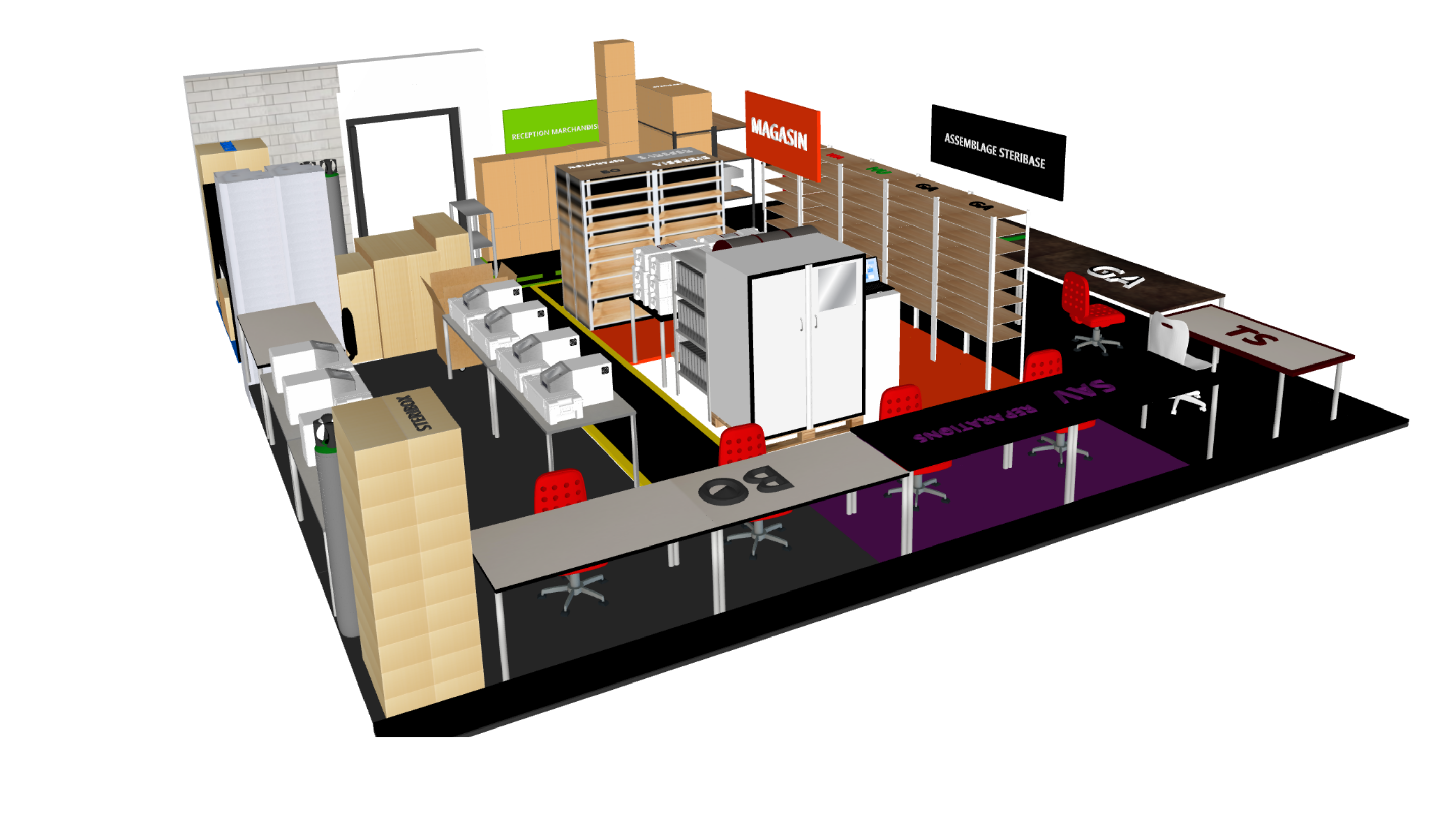
Manufacturing Optimization
Workshop restructuration for medical devices
Supply Chain & Operations · Professional
Context (The Why)
A medical-device startup needed to scale production without sacrificing quality or increasing lead times.
Solution (The What)
Complete operational restructuring: workshop reorganization into sequential assembly stations, batch size optimization, and ERP-based inventory tracking.
Implementation (The How)
Reorganized the workshop into a station-by-station layout, designed custom QC test bench furniture, diagnosed bottlenecks causing supply stalls, and restructured into smaller synchronized batches.
Role
Operations Consultant
Duration
2024 – 2025
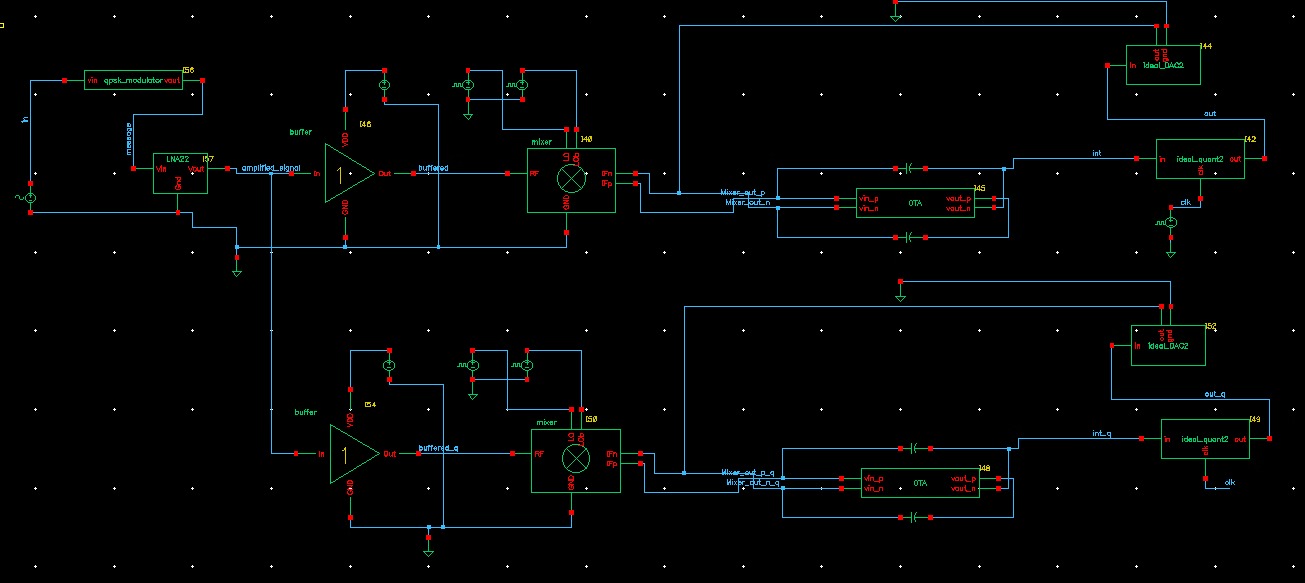
915MHz SDR Receiver
Continuous-Time Sigma-Delta design
Microelectronics & Photonics · Academic
Context (The Why)
Software-defined radios need high-quality digitization right after the antenna, but most academic designs treat the ADC as an afterthought.
Solution (The What)
A full 915 MHz receiver chain in 65 nm CMOS — LNA (45.87 dB gain, 1.21 dB NF), passive mixer, and 1-bit CT-ΣΔ ADC — with verified OOK/QPSK demodulation.
Implementation (The How)
Designed all transistor-level blocks in Cadence Virtuoso, integrated incrementally with Verilog-A validation, and built a Python demodulation pipeline.
Role
RF IC Designer
Duration
Fall 2025
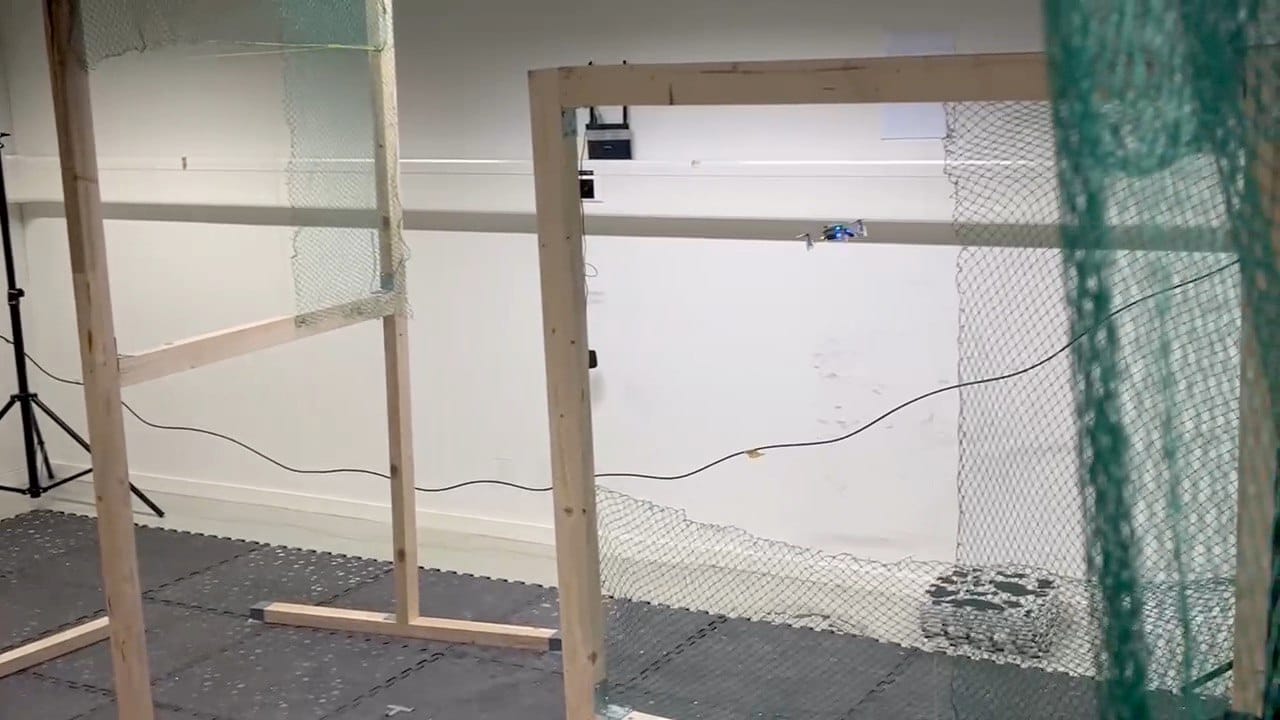
Aerial Robotics Drone
Autonomous flight stack & racing
Robotics & AI · Academic
Context (The Why)
Autonomous drone racing algorithms work in simulation but often fail on real hardware with tight compute and weight budgets.
Solution (The What)
A modular flight stack for gate detection, planning, and control on a Crazyflie quadcopter, achieving a 13.87 s lap — 8.7x faster than baseline.
Implementation (The How)
Implemented a minimum-jerk trajectory planner with a two-run strategy (reconnaissance then performance) and Lighthouse-based state estimation.
Role
Robotics Engineer
Duration
Spring 2025
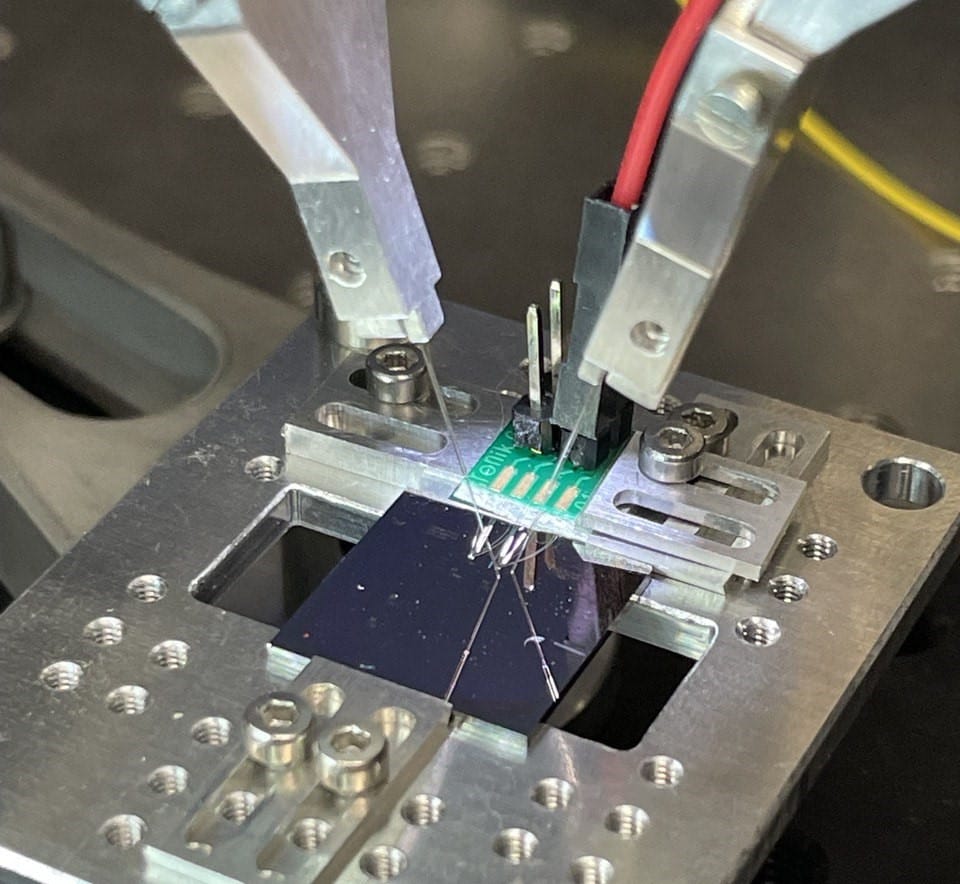
Integrated Photonic Chip
SOI waveguide & resonator fabrication
Microelectronics & Photonics · Academic
Context (The Why)
Textbook photonic device theory rarely survives contact with a real cleanroom. This project closed that gap hands-on.
Solution (The What)
An SOI photonic chip with waveguides, MZIs, and ring resonators (Q up to ~20,500, Lorentzian fit) fabricated and characterized across 11 cleanroom sessions at EPFL CMi.
Implementation (The How)
Performed e-beam lithography, cryogenic dry etching (3.6 % depth error), PECVD cladding, and gold lift-off, then characterized devices at 1550 nm.
Role
Fabrication Engineer
Duration
Spring 2024
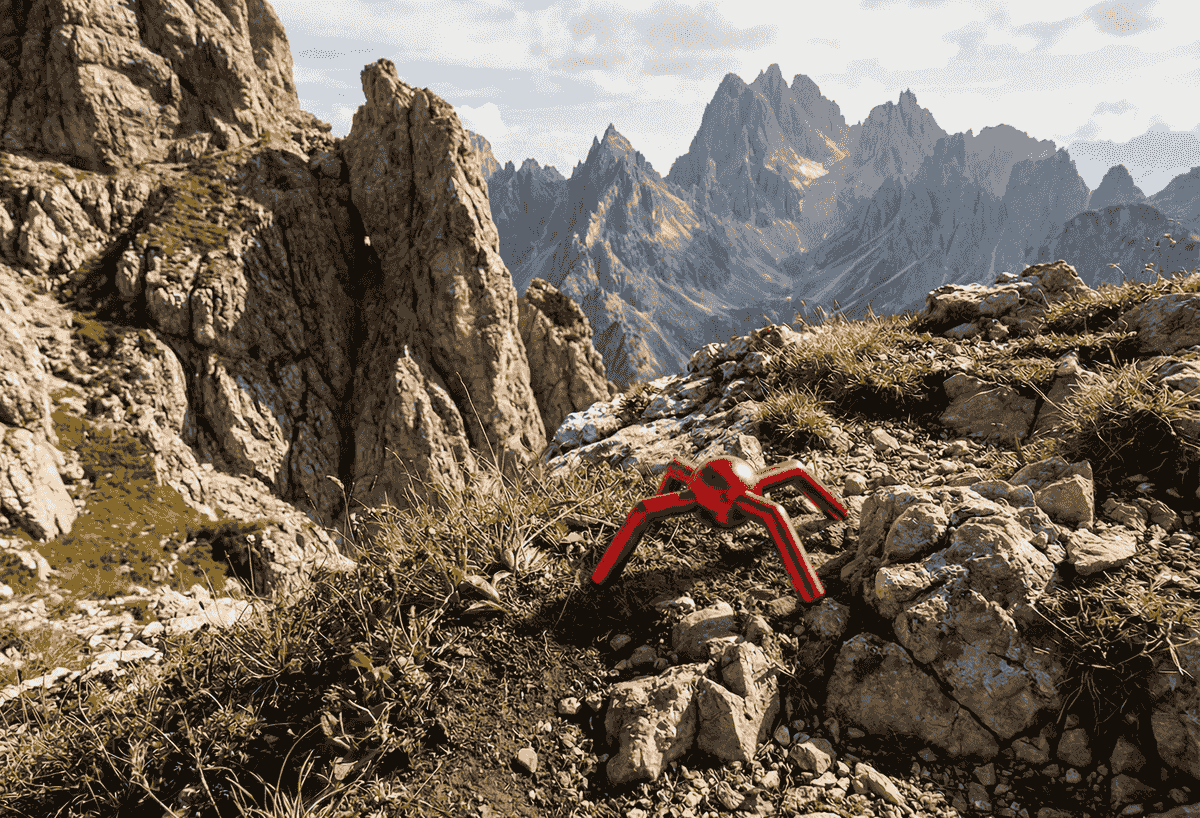
Rough Terrain Locomotion
Co-evolution of robot morphology and control
Robotics & AI · Academic
Context (The Why)
Robot design usually optimizes the brain (controller) and body (morphology) separately, but in nature they co-evolve.
Solution (The What)
An evolutionary simulation that co-optimizes quadruped limb lengths and neural network weights, revealing terrain-dependent body plans across 100 generations.
Implementation (The How)
Evolved 30 individuals with NSGA-II encoding both MLP weights and limb segments, simulated in MuJoCo (Ant-v5) to extract Pareto fronts.
Role
Course Researcher
Duration
Spring 2025
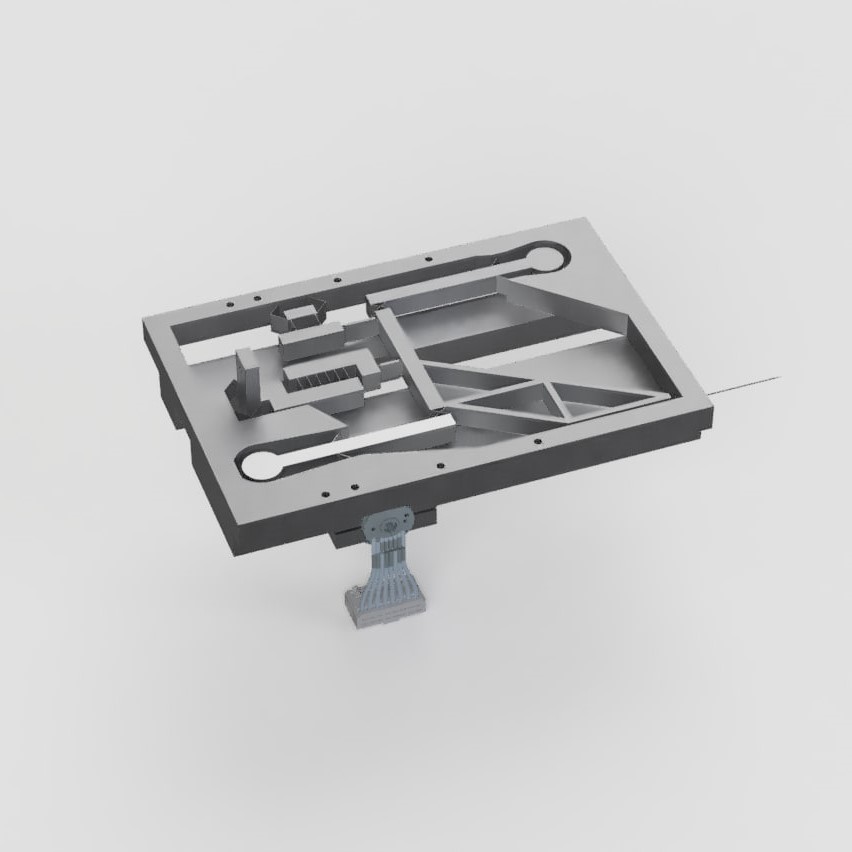
Dynabal Force Sensor
High-precision dynamometric balance
Industrial Design & Mechanical · Academic
Context (The Why)
Friction in traditional joints limits the precision of force-sensing instruments. Flexure-based designs eliminate it entirely.
Solution (The What)
A 1-DOF force sensor achieving 1.7 nN theoretical resolution and a 403-million dynamic range with adjustable stiffness from 0.17 to 808 N/m.
Implementation (The How)
Designed a Watt mechanism with motor-driven stiffness compensation, wire EDM fabrication (0.05 mm), and capacitive sensing (10 nm). Validated in MATLAB.
Role
Mechanical Engineer
Duration
Spring 2023
Automatic Carrot Peeler
Capstone mechanical construction
Industrial Design & Mechanical · Academic
Context (The Why)
First-year capstone to learn mechanical construction, dimensioning, and manufacturing drawing from scratch.
Solution (The What)
A hand-cranked device with a lever mechanism synchronizing carrot rotation and blade translation, machined on 3-axis CNC.
Implementation (The How)
Modeled all parts and assemblies in CATIA V5 and performed static analysis on lever linkages and shafts.

Role
Mechanical Designer
Duration
Spring 2022
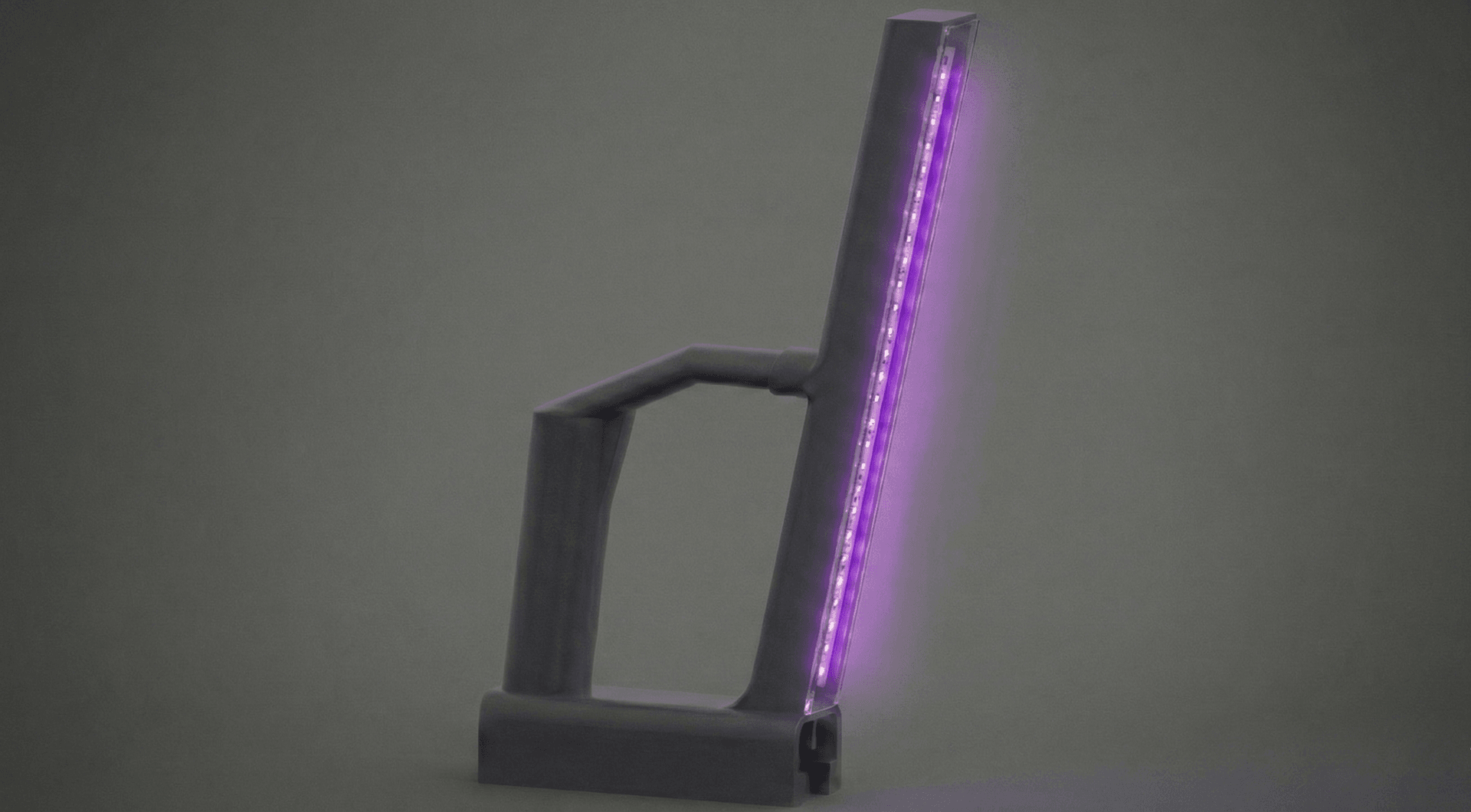
Uveya UV Sanitizer
Handheld UV-C sanitizer for aircraft
Industrial Design & Mechanical · Freelance
Context (The Why)
During COVID-19, airlines needed fast, chemical-free sanitization in tight cockpit spaces.
Solution (The What)
A handheld UV-C sanitizer housing a UV-LED array with a quick-release battery system designed for rapid swaps between cabin sections.
Implementation (The How)
Co-designed a quick-release battery holder in CATIA V5 with ergonomic grip geometry and snap-fit assembly for tool-free maintenance.
Role
Freelance Designer
Duration
Fall 2021
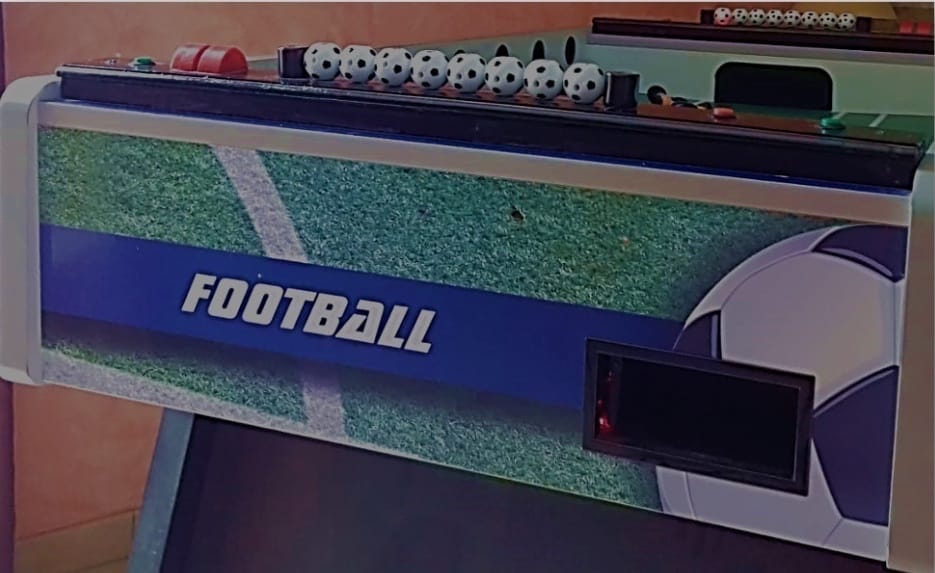
Automated Foosball Scorer
Laser-barrier goal detection system
Embedded Systems · Personal
Context (The Why)
Foosball players argue about scores, especially with obscure French Federation rules like 'Gamelles' and 'Pissettes'.
Solution (The What)
A table add-on that detects goals with break-beam lasers and enforces official rules automatically on multiplexed LED displays.
Implementation (The How)
Built a C++ finite state machine for the full ruleset and drove 16+ LEDs through 74HC595 shift registers on limited GPIO.
Role
Embedded Developer
Duration
Spring 2020